
Divergencia en sistemas curvilíneos
Buenas, hoy culminare con esta serie de post sobre la divergencia que por cuestiones de comodidad he dividido en tres partes.
Retomando lo que comente al principio del post anterior sobre la derivada de un vector respecto a un parámetro es un vector, en coordenadas cartesianas esto es la derivada de las componentes ya que las derivadas de la base es 0 porque no depende de parámetros


Ahora en el caso de un espacio no ortogonal esto no se cumple de esta manera, ya que algunas bases depende de ciertos parámetros, es decir cambia según el punto y tenemos que

Siendo épsilon una base genérica. Solamente daré una breve explicación ya que si hago el cálculo o un ejemplo más ilustrativo se haría el post muy largo y además que no es precisamente el tema en cuestión. ahora bien, la derivada de un vector es un vector, en coordenadas cartesianas lo podemos apreciar fácilmente como explique anteriormente, pero en coordenadas no-ortogonales ¿qué pasa? hay dos términos en la derivada ¿cómo pueden ser esto un vector? ya que 



Y ahora sí, la derivada de un vector en un espacio no ortogonal es igual a la derivada absoluta de la componente, esto era para que tuvieran un poco de cultura general, ahora si a el tema principal del post empezare con lo principal transformar nuestro vector expresado en las base de vectores 




Expresando el vector r por medio de sus bases tenemos

Sacando factor común r y haciendo 1=x, 2=y y 3=z
![\vec{r} = r[(sen\theta cos\phi)\vec{e}_x + (sen\theta sen\phi)\vec{e}_y + (cos\theta)\vec{e}_z]](https://s0.wp.com/latex.php?latex=%5Cvec%7Br%7D+%3D+r%5B%28sen%5Ctheta+cos%5Cphi%29%5Cvec%7Be%7D_x+%2B+%28sen%5Ctheta+sen%5Cphi%29%5Cvec%7Be%7D_y+%2B+%28cos%5Ctheta%29%5Cvec%7Be%7D_z%5D++&bg=ffffff&fg=333333&s=3&c=20201002)
bien, ya tenemos algo, pero como podemos continuar si no sabemos como están expresadas las bases 


Expandiendo un poco la convención de Einstein tenemos para las



Ahora expandamos las k, de la manera k=x,y,z




Sentí que no era necesario repetir los 3 pasos que hice con 

Hacemos las respectivas derivadas y tenemos

Respectivamente haciendo las derivadas para 





Y aquí tenemos la base (
Si buscan en las bases vemos que hay una que concuerda perfectamente en esta expresión y la sustituimos para obtener

Y así se expresa nuestro vector r en coordenadas esféricas, donde su única componente es lo que multiplica a


Ya casi llegamos, nos falta saber cómo es la métrica en este espacio de coordenadas esféricas, de nuevo esto fue algo que explique en el post de cambio de coordenadas así que no lo volveré a explicar, definiré como se hace y los vectores base ya los tienen listos arriba por eso los desarrolle porque como vieron no nos fueron realmente útiles en esa parte y la métrica se define como






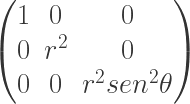
y para calcular su inversa, se le calcula la inversa como a una matriz común y corriente, de nuevo como nos enseñaron en bachillerato(aquí apreciamos que lo que nos enseñaron en bachillerato no fue inútil)


Bueno ya tenemos todas las herramientas para calcular la divergencia, y comenzaremos calculando el símbolo de christoffel
Directamente podemos ver que el símbolo de christofel multiplica a un término que son las componentes del vector, recordando que el vector solamente tiene una componente no tiene sentido expandir este término y lo reducimos a la siguiente expresion

Y redefinimos el símbolo de christoffel

Por cuestiones de comodidad trabajare los índices cuando estén en la matriz como números como he venido haciendo es decir 

Ahora expandamos para i=1

Si revisamos en la matriz inversa vemos que solo tiene sentido decir que k=1




Como el termino 

De nuevo viendo la matriz inversa vemos que solamente si k=2 este expresión tendría sentido

Ahora sustituimos las componentes de las matrices y tenemos




Bien, ya vemos que un termino del símbolo de christoffel no es igual a 0, ahora veamos que pasa para cuando i=3

De nuevo solo tiene sentido decir que k=3, por si acaso no lo vieron solo tiene sentido decir esto porque si revisan la matriz inversa verán que para cuando k = 2 entonces 






Y ya estamos listos ya no tenemos más nada que hacer resolvamos nuestra divergencia



Como el vector solo tiene una sola componente tampoco tiene mucho sentido expandir este término de la derivada parcial





Y voila aquí tenemos el resultado que esperábamos efectivamente la regla se cumplió y sin más palabras me despido.
Saludos.
Fuentes: cultura general.


coño marico buen post. Que cuentas tan feas solo para que de 3 jaja
gracias… son bonitas las cuentas D: